哈佛大学3D打印自折叠“Rollbot”为完全不受束缚的软机器人铺平道路
2021-07-22 22:41:10 作者:3D科学谷 来源:3D科学谷
现在,哈佛大学约翰·A·保尔森工程与应用科学学院 (SEAS) 和加州理工学院的研究人员开发出受折纸启发的软体机器人系统,可以响应外部刺激而移动和改变形状,为完全不受束缚的软体机器人铺平了道路,该研究发表在《科学机器人》上。
© Lori Sanders/Harvard SEAS
模糊了材料与机器人的界限
其核心原理是3D 打印的活动铰链可根据热量改变形状,当温度从环境温度升高到 100°C(顶部铰链启动)到 150°C(底部铰链启动)时,该设备展示了顺序折叠。图片来源:Lori Sanders/Harvard SEAS
根据 Jennifer A. Lewis 博士,将活性材料集成到 3D 打印物体中,能够设计和制造全新类别的软机器人材料。研究人员转向折纸来创造多功能软机器人,通过连续折叠,折纸可以在单个结构中编码多种形状和功能。研究小组使用被称为液晶弹性体的材料,在受热时会改变形状,3D 打印了两种类型的软铰链,它们在不同的温度下折叠,因此可以编程以按特定顺序折叠。通过3D 打印活动铰链方法,对温度响应、铰链可以施加的扭矩量、弯曲角度和折叠方向具有完全的可编程性。哈佛大学和加州理工学院的制造方法有助于将这些活性成分与其他材料相结合。
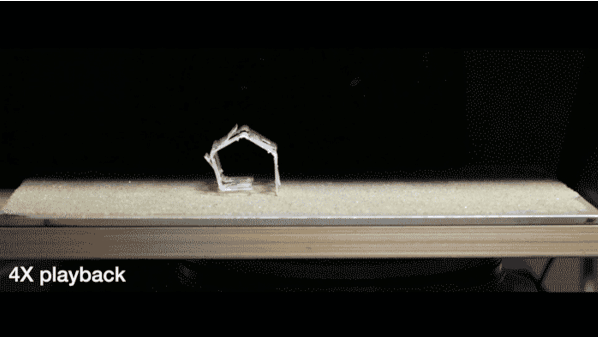
自折叠“Rollbot”为完全不受束缚的软机器人铺平道路
为了演示这种方法,团队构建了几个软设备,包括一个绰号为“Rollbot”的不受束缚的软机器人。自走式 Rollbot 最初是一块平板,长约 8 厘米,宽约 4 厘米,放置在热表面上时会卷曲成一个五边形的轮子。嵌入车轮五个侧面的铰链在与表面接触时折叠,推动车轮转向另一侧。当铰链从热表面滚落时,它们会展开并为下一个循环做好准备。
© Lori Sanders/Harvard SEAS
使用铰链可以更轻松地对机器人功能进行编程并控制机器人如何改变形状,通过3D打印使得变形可控,与其让软机器人的整个身体以难以预测的方式变形,通过3D打印只需要编程结构的几个小区域以设置如何响应温度变化。许多现有的软机器人需要连接外部电源和控制系统,或者受到它们可以施加的力的限制。3D科学谷了解到这些3D打印的主动铰链很有用,因为它们允许软机器人变得更加“自主可控”,并且可以提升比铰链重许多倍的物体。
自我驱动
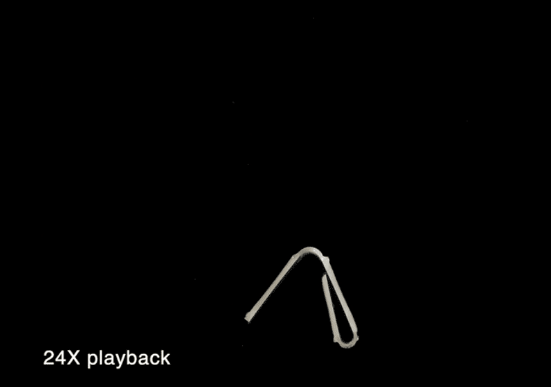
一种设计展示了顺序折叠,它可以在加热时折叠成类似于回形针的紧凑折叠形状,冷却时可以自行展开。另一种设计,当放置在炎热的环境中时,可以折叠成类似于回形针的紧凑折叠形状,并在冷却时自行展开。这些不受束缚的结构可以被动控制,科研人员需要做的就是将结构暴露在特定的温度环境中,这些结构将根据科研人员对铰链进行编程的方式做出响应。虽然这项研究只关注温度响应,但液晶弹性体也可以通过编程来响应光、pH、湿度和其他外部刺激。
这项工作展示了响应聚合物在复合材料中的组合如何导致材料具有自我驱动能力以响应不同的刺激。未来,这些材料可以通过编程来执行更复杂的任务,这模糊了材料和机器人之间的界限。这项研究得到了陆军研究办公室、哈佛材料研究科学与工程中心、美国国家科学基金会和美国宇航局空间技术研究奖学金的支持。
上一篇:什么是3D打印机?一起来看看关于它的详细介绍
下一篇:最后一页
 收藏
收藏
-
联想拯救者新品齐发,探索AI PC全新未来
2024-01-18 01:20
-
达索系统赋能哪吒汽车迈向全球化智能制造
2023-08-15 12:11
-
西门子王海滨:数字化转型正迎来规模化落地的高速发展期...
2023-02-24 17:04
-
驰骋数字化转型新浪潮,欧特克与客户携手探索融合发展新可能...
2022-11-21 17:35
-
联想全链智能技术亮相世界制造业大会 以新IT引领行业智能化破局...
2022-09-20 16:25
-
2022未来科学大奖获奖名单公布
2022-08-21 15:52






